One String to Pull Them All: Fast Assembly of Curved Structures from Flat Auxetic Linkages
Abstract
We present a computational approach for designing freeform structures that can be rapidly assembled from initially flat configurations by a single string pull. The target structures are decomposed into rigid spatially varied quad tiles that are optimized to approximate the user-provided surface, forming a flat mechanical linkage. Our algorithm then uses a two-step method to find a physically realizable string path that controls only a subset of tiles to smoothly actuate the structure from flat to assembled configuration. We initially compute the minimal subset of tiles that are required to be controlled with the string considering the geometry of the structure and interaction among the tiles. We then find a valid string path through these tiles that minimizes friction, which will assemble the flat linkage into the target 3D structure upon tightening a single string. The resulting designs can be easily manufactured with computational fabrication techniques such as 3D printing, CNC milling, molding, etc. in flat configuration that, in addition to manufacturing, facilitates storage and transportation. We validate our approach by developing a series of physical prototypes and showcasing various application case studies, ranging from medical devices, space shelters, to architectural designs.
Actuation Demos
A small scale chair deployment
A small scale Lilium deployment
Human-scale chair deployment and disassembly into a flat, compact configuration
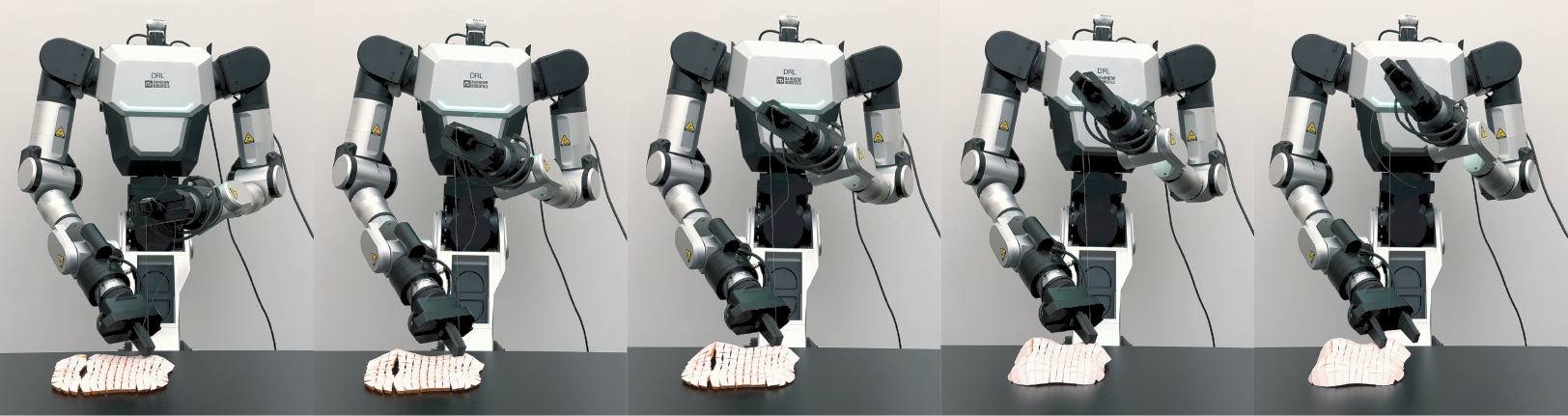
A Humanoid robot deploying Lilium structure with a single string pull
Diverse Doubly Curved Surfaces
Fabricated Prototypes
All models are manufactured via multi material 3D printing (FDM), using orange PLA for the rigid tiles and white TPU for the hinges.
Applications

Personalized medical items such as splints (Left) and posture correctors (Right). Both are optimized for a given patient, then manufactured, stored and carried flat, and can be easily assembled by a single string pull.
Consumer goods such as Furniture; We designed and built a functional human-scale chair: assembled configuration (top-left) and top and side-view of flat configuration (top-right). Timelapse of deploying and disassembling a chair, demonstrating the reversible actuation capability of our method.

Modular space habitat. Our method is convenient for designing flat-manufactured modular habitats that are compact to store and transport, and can be rapidly deployed, disassembled, and reassembled through robotic assembly in hostile extraterrestrial environments, potentially saving critical time and energy in future space missions.

Rapid assembly of architectural structure. Our geometric approximation could provide the frames around the glass panels which can be fully manufactured off-site, transported flat, and deployed onsite using only two cranes. While our design method is scalable, realizing full architectural deployment requires future engineering studies.
Our method can simplify autonomous robotic assembly of structures, as the single string pull actuation mechanism is a much simpler motion planning task than assembling individual modules.
BibTeX
@article{OneStringtoPullThemAll,
author = {Akib Zaman and Jacqueline Aslarus and Jiaji Li and Stefanie Mueller and Mina Konakovi{\'c} Lukovi{\'c}},
title = {One String to Pull Them All: Fast Assembly of Curved Structures from Flat Auxetic Linkages},
journal = {ACM Transactions on Graphics},
volume = {44},
number = {6},
year = {2025},
pages = {18},
month = dec,
note = {To appear in ACM TOG after SIGGRAPH Asia 2025}
}